IoT: Mobile Robots & Long-Range Sensor Tags
2015
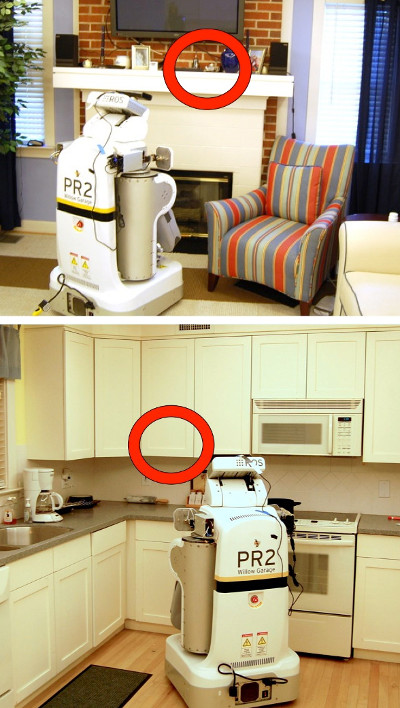
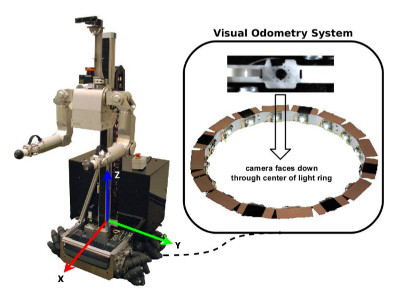
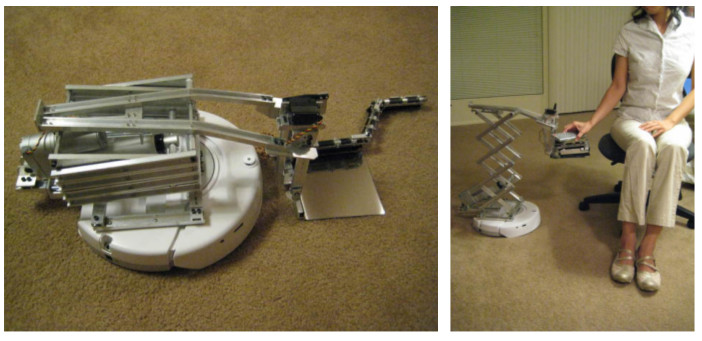
A shared vision for the Internet of Things wherein mobile readers (robots or mobile phones) interact with smart objects — objects with embedded microelectronics that perform computation, sensing, communication, energy storage, and power harvesting. Using autonomous mobile robots outfitted with UHF RFID readers, I explored applications including soil moisture sensing, remote crop monitoring, infrastructure monitoring, water quality monitoring, livestock monitoring, and remote sensor deployment.